
Ang power-assisted manipulator gitawag usab nga pneumatic balance power-assisted manipulator, pneumatic balance crane, ug balance booster. Kini usa ka bag-ong aparato nga gitabangan sa gahum nga gigamit alang sa mga operasyon nga makadaginot sa pagtrabaho sa panahon sa pagdumala sa materyal ug pag-instalar. Kini usa ka pneumatically assisted, manually operated manipulator. Ang paggamit sa power-assisted manipulators makapakunhod sa labor intensity sa mga operators, makakab-ot sa gaan nga operasyon ug tukma nga positioning kung mag-handle sa bug-at nga workpieces, ug masiguro ang kaluwasan sa mga ekipo ug operators. Ang power-assisted manipulator kasagarang gigamit sa pagtabang sa mga trabahante sa pagdumala ug pag-assemble, ug usa ka power-assisted handling equipment nga makapamenos sa labor intensity. Gikombinar niini ang mga prinsipyo sa ergonomic ug naghatag og materyal nga transportasyon, pagdumala sa workpiece ug asembliya uban ang mga konsepto sa kaluwasan, kayano, kahusayan ug pagdaginot sa enerhiya. Atol sa proseso sa transportasyon, ang mga ekipo kontrolado sa usa ka lohikal nga sirkito sa hangin, nga nagbag-o sa gibug-aton sa bug-at nga butang sa iyang kaugalingon ngadto sa usa ka gamay nga manual operating force, dali nga makaamgo sa paglihok, transportasyon ug asembliya sa bug-at nga mga butang sa bisan unsa nga posisyon sa operating luna, ug pagsulbad sa industriyal nga transportasyon ug problema sa asembliya nga luwas ug episyente. Ang non-standard customized fixtures makakompleto sa mga aksyon sama sa grabing, transporting, flipping, lifting, ug docking workpieces (mga produkto), ug sa madali ug tukma nga pag-assemble sa bug-at nga mga butang sa preset positions. Maayo kini alang sa pagkarga ug pagdiskarga sa mga materyales ug pagpundok sa produksiyon. Ang mga kagamitan nga gitabangan sa gahum makaluwas sa pagtrabaho ug makapauswag sa kahusayan alang sa pabrika.
Ang hard-arm power-assisted manipulator naglangkob sa usa ka balanse nga host, usa ka grabbing fixture, ug usa ka istruktura sa pag-install. Makabalanse kini sa nagkalain-laing mga gibug-aton gikan sa 20 ngadto sa 300kg ug angay alang sa mga operasyon sa pagbalhin sa materyal. Ang mga kinaiya sa bug-os nga balanse ug hapsay nga paglihok nagtugot sa operator sa dali nga pagdala sa workpiece, pagpoposisyon, asembliya ug uban pang mga operasyon. Kini adunay taas nga kalig-on, yano nga operasyon, taas nga kahusayan, taas nga performance sa kaluwasan, ug adunay himan nga gas cutoff protection device. Ang mga nag-unang sangkap tanan gihimo sa mga inila nga tatak sa internasyonal, ug ang kalidad gigarantiyahan. Kini adunay usa ka bug-os nga suspension function ug sayon sa pag-operate; gigama sumala sa ergonomic nga mga prinsipyo, kini komportable ug sayon sa pag-operate; ang structural design kay modular ug ang air circuit control gisagol; ang gasto sa labor mikunhod sa 50%, labor intensity mikunhod sa 85%, ug ang produksyon efficiency misaka sa 50%; sumala sa load ug stroke, sila customized ug moabut sa lain-laing mga porma sa pagsugat sa lain-laing mga panginahanglan. Kasangkaran sa paggamit sa power-assisted manipulators: kaylap nga gigamit sa bodega loading ug unloading sa automotive industriya, kemikal nga industriya, produkto packaging, electrical appliance industriya, ceramic sanitary ware industriya, building materyales ug furniture industriya, metal nga mga bahin, makinarya manufacturing ug pagproseso, nagbalik-balik nga high-frequency handling work, natural gas ug petroleum energy Industry, bag-ong enerhiya nga baterya, automated logistics ug uban pang mga industriya, nga adunay lain-laing mga grippers, kini makaamgo sa pagdumala ug palletizing sa mga produkto sa lain-laing mga porma sa lain-laing mga industriya.
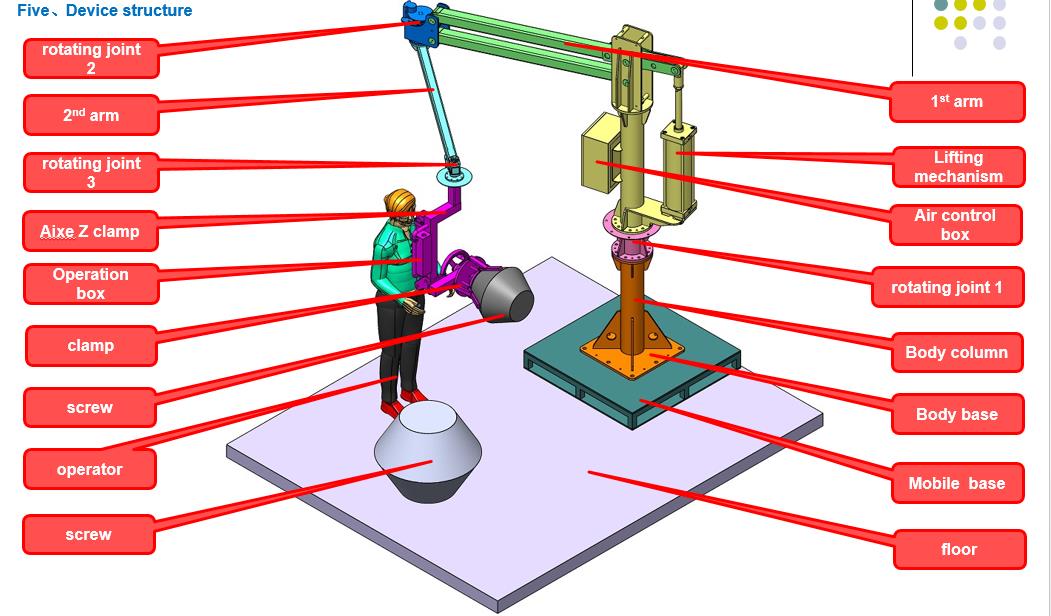
Kini nga power-assisted manipulator device naglangkob sa usa ka fixed base, body column, joint cantilever, lifting mechanism, Z-axis clamp, operating handle ug uban pang mekanikal nga mga bahin. Gipalihok sa operator ang power-assisted manipulator ngadto sa graphite electrode. Gipalihok sa operator ang power-assisted manipulator clamp sa yuta aron makuha ang graphite electrode screw. Human sa pag-ilog, kini dad-on ngadto sa graphite electrode thread port, mibalik sa 90 degrees, ug ang staff tightens sa screw thread alang sa asembliya. Kung itandi sa manual handling, kini nga ekipo adunay mas gaan nga operating force, mas paspas nga operating speed, simple nga istruktura, ubos nga failure rate, sayon nga maintenance, ug ubos nga maintenance cost. Gipadapat niini ang prinsipyo sa balanse sa puwersa aron tugotan ang operator sa pagduso ug pagbira sa bug-at nga mga butang. Mahimo kini nga molihok ug balanse nga posisyon sa katugbang nga wanang, labi na angay alang sa pagdumala ug pag-palletize sa mga workpiece nga adunay tukma nga pagposisyon o mga kinahanglanon sa asembliya. Gigamit kini sa lainlaing mga industriya aron makunhuran ang mga kadaot sa likod sa operator ug kakapoy, samtang gipauswag ang kahusayan ug kalidad sa produksiyon. Ang mga manipulator ug mga accessories kay custom nga gidisenyo ug gigama.
Ang lawas sa manipulator gihimo sa mga profile sa carbon steel. Ang nawong kay electrostatically powder-sprayed ug giluto sa taas nga temperatura. Kini labi ka mahigalaon sa kalikopan, matahum ug resistensya sa kaagnasan kaysa pagpintal sa spray. Ang sistema sa pagkontrol nagsagop sa usa ka butones nga mekanikal nga balbula + shift switch nga kombinasyon, nga sayon nga operahan ug lig-on sa paghawid. Ang kontak nga nawong sa produkto gihimo sa Non-metallic nga materyal aron mapanalipdan ang produkto.
Ang operator naggamit og forklift aron itulod ang power-assisted manipulator ngadto sa graphite electrode assembly area para sa fixation, ipalihok ang power-assisted manipulator clamp sa ibabaw sa screw sa yuta, ibutang ang clamp, kontrolahon ang manipulator sa pag-clamp sa screw pinaagi sa mga buton, ihatod kini sa kilid sa sinulid nga lungag sa graphite electrode, i-flip ang clamp, I-align ang electrode ug isulod kini, dayon ang operator mano-mano nga magtuyok sa gripper clamp aron ma-lock ang screw gamit ang graphite electrode. Human sa pag-lock, ablihi ang clamp pinaagi sa buton aron maluagan ang screw, ibalhin ang clamp sa yuta ibabaw sa screw pag-usab, i-flip ang clamp aron mapili ang screw, ug dayon ibalhin sa sunod nga graphite electrode aron magsugod sa pag-lock sa asembliya…
Oras sa pag-post: Okt-11-2023




{kind=link}